PDE-Powered Double Pendulum Simulation for Orthosis Development
Oct 2024 – Dec 2024
This project presents a simulation of the knee joint using a double pendulum. The knee is a complex hinge with movements such as flexion, extension, and slight rotation, and we use the double pendulum model because it effectively represents the thigh and the shin as two linked pendulums.
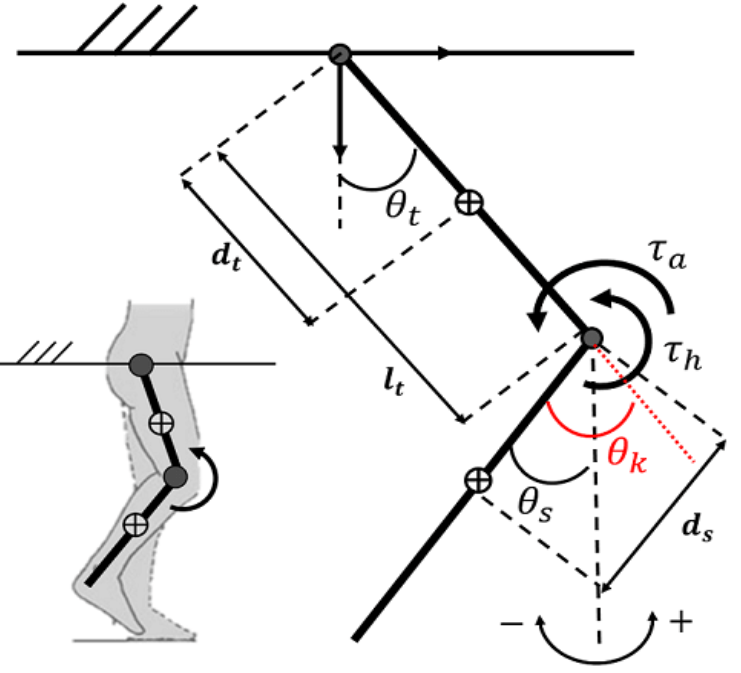
Figure 1 – Double Pendulum as a Model of the Knee Joint
A double pendulum’s motion is characterized by chaos, as it is modelled by the unsolvable partial differential equation shown in Figure 2 below.

Figure 2 – Partial Differential Equation for Double Pendulum Motion
As such, we simulate the solution of this equation, and thus the motion of a knee, using a Newtonian approach and a Numerical approach.
Newtonian Simulation
Video 1 – Large Angle Approximation Indicating Chaos
Video 2 – Small Angle Approximation Indicating Periodicity
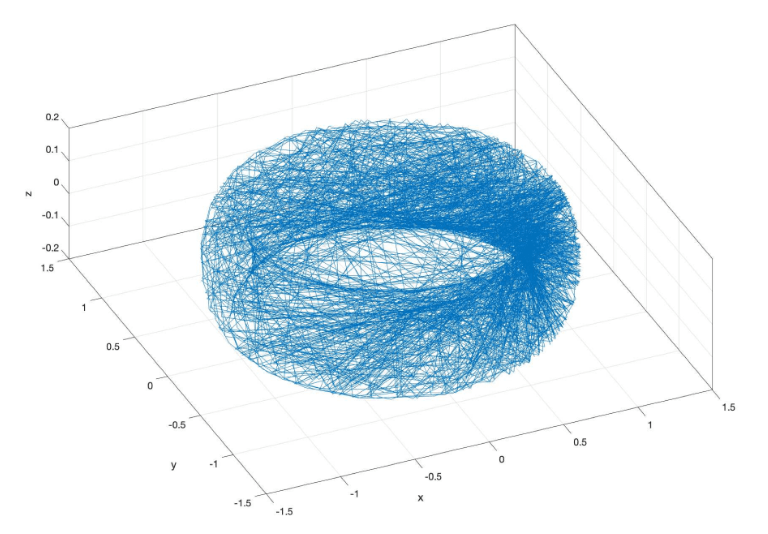
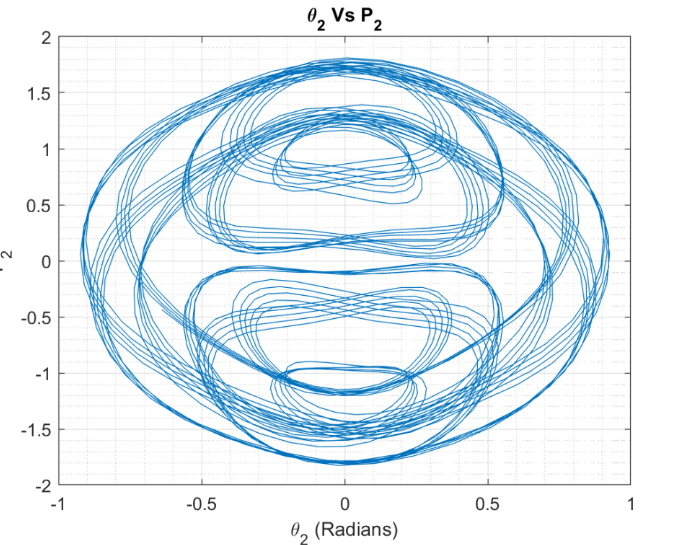
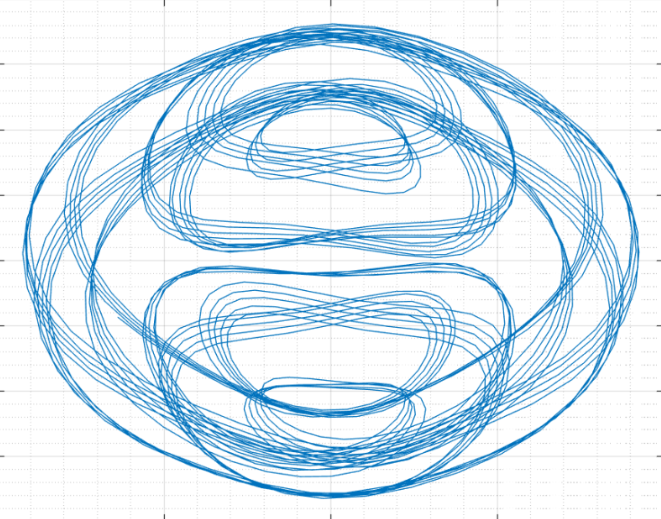
Figure 3 – Poincaré Maps to Visualize Periodicity and Chaos. (a) larger angles, in which points scatter randomly (indicating chaos); and (b) small angles, in which points form closed loops (indicating periodicity).
Numerical Simulation
Video 3 – Side-by-side Comparison of 3 Double Pendulum Approximation Methods and their Energy Diagrams
