Forward Kinematics
Aug 2021 – Dec 2021
This project presents a simulation of the motion of a multi-degree of freedom kinematic chains that form the structure of a robotic system. The objective was to develop a software that can simulate the motion of a multi-degree of freedom kinematic chains that form the structure of a robotic system. The links of the robot were modeled as rigid bodies and its joints are assumed to provide pure rotation or translation. The program enables the user to modify the robot as many times desired to new positions.
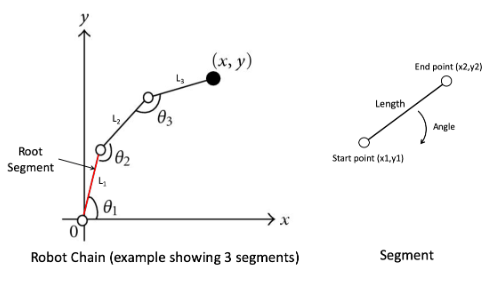
Figure 1- (a) Robot with 3 Segments; and (b) Segment Parameters
